Слайд 1ИСПЫТАНИЯ МОДЕЛЕЙ СУДОВ
Экспериментальные методы морской гидромеханики
Слайд 2Методы и средства
модельных исследований
мореходных качеств судна
Методы математического моделирования
не позволяют во всех
деталях описать сложные гидродинамические процессы
взаимодействия судна с
окружающей средой, особенно в тех случаях,
когда существенную роль играет вязкость жидкости. По этой причине
физический модельный эксперимент является неотъемлемой частью
исследований мореходных качеств корабля. С его помощью осуществляются
проверка и корректировка теоретических решений,
разработка практических способов расчета, прогнозирование и
оптимизация ходкости и управляемости, динамической остойчивости
и мореходности.
Для этой цели создана необходимая экспериментальная база,
включающая как универсальные, так и уникальные специализированные лабораторные установки. К ним относятся опытовые
бассейны, гидролотки, циркуляционные и штормовые бассейны,
аэродинамические и кавитационные трубы, кавитационные и ледовые
бассейны, полигоны для испытаний самоходных моделей.
Слайд 3•
•
•
•
Определение сопротивления
Испытания винта в открытой воде
Самоходные испытания
Испытания в кавитационной трубе
–
–
–
–
Определение
кавитации
Пульсации давления
Измерение шума
Кавитационная эрозия
• Маневренные испытания
– Самоходные маневренные испытания
–
Испытания с помощью Planar Motion Mechanism (PMM)
Рекомендованные испытания
- Главные:
Слайд 4Опытовые бассейны
Опытовые бассейны относятся к наиболее распространенному типу экспериментальных установок
и служат для решения задач ходкости, мореходности и управляемости судна,
изучения работы судовых движителей и взаимодействия их с корпусом судна, выполнения различных научно-исследовательских работ.
VIDEO
Слайд 5В зависимости от решаемых задач различают глубоководные,
мелководные и скоростные бассейны.
В ряде случаев глубоководные бассейны оборудуются подъемным
“днищем”, позволяющим имитировать мелководье.
Модель судна или другого испытуемого объекта приводится в
движение при помощи буксировочной тележки, движущейся по рельсам по бортам бассейна. Связь тележки с моделью осуществляется при помощи многокомпонентного динамометра, а также устройств, позволяющих модели свободно всплывать и дифферентоваться при заданном курсовом угле. Такие бассейны называют динамометрическими, или бассейнами типа Фруда.
Слайд 7Характеристики опытовых бассейнов
Глубоководный опытовый бассейн
Предназначен для проведения буксировочных и самоходных испытаний
надводных и подводных моделей судов в условиях глубокой воды и
вблизи свободной поверхности, а также для испытаний гребных винтов и изолированных движительных комплексов.
Размеры бассейна:
ширина - 15 м,
глубина - 7 м,
длина - 1324 м.Бассейн состоит из двух частей, каждая из которых оснащена двумя буксировочными тележками, позволяющими испытывать модели судов длиной до 10 метров со скоростью до 20 м/с.
Предельная глубина погружения подводной модели составляет 2 метра.
Оборудование бассейна позволяет осуществлять измерения сил на моделях судового корпуса и движителя, проводить исследования характеристик неоднородного нестационарного пространственного потока в месте расположения движителей, моделировать натурные условия обтекания корпуса путем использования полимерных добавок
Слайд 8Характеристики опытовых бассейнов
Бассейн У. Фруда
Слайд 9Характеристики опытовых бассейнов
длина - 50,0 м;
ширина - 5,0 м;
высота борта
- 3,0 м;
высота налива воды - 2,5-2,6 м;
скорость буксировки модели
- до 5 м/с.
Для изготовления моделей на станции испытаний моделей судов ( СИМС) находятся мастерские, оснащенные необходимым станочным оборудованием, позволяющим выполнить столярные, слесарные, токарные и сварочные работы. Первая модель была испытана в мае 1991 года.
ОАО КБ "Вымпел
Слайд 10Опытовый_бассейн_СПГУВК,_общий_вид
Слайд 11Крепление_модели_под_тележкой_бассейна_СПГУВК
Слайд 12Буксировочная_тележка_опытового_бассейна_СПГУВК
Слайд 15Определение сопротивления
• Процедура:
– Модель разгоняется до нужной скорости
–Скорость удерживается
постоянной более 10 секунд (или более времени прохода 10 длин
корпуса)
- Средние значения измерений за период постоянной скорости рассчитываются
ТЕЛЕЖКА
Измеряем:
Сопротивление модели RTm
Скорость модели
Осадки носом и кормой
МОДЕЛЬ
Измерительные
динамометры
Гибкие соединения
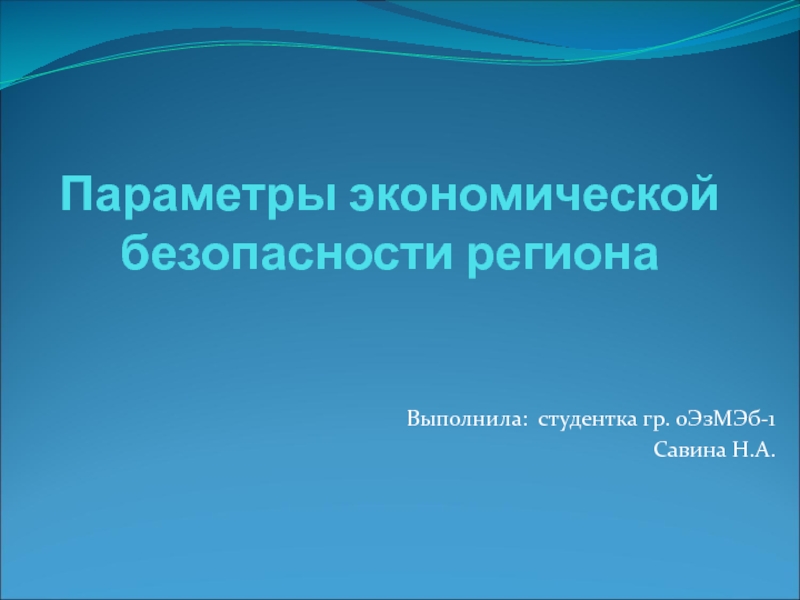
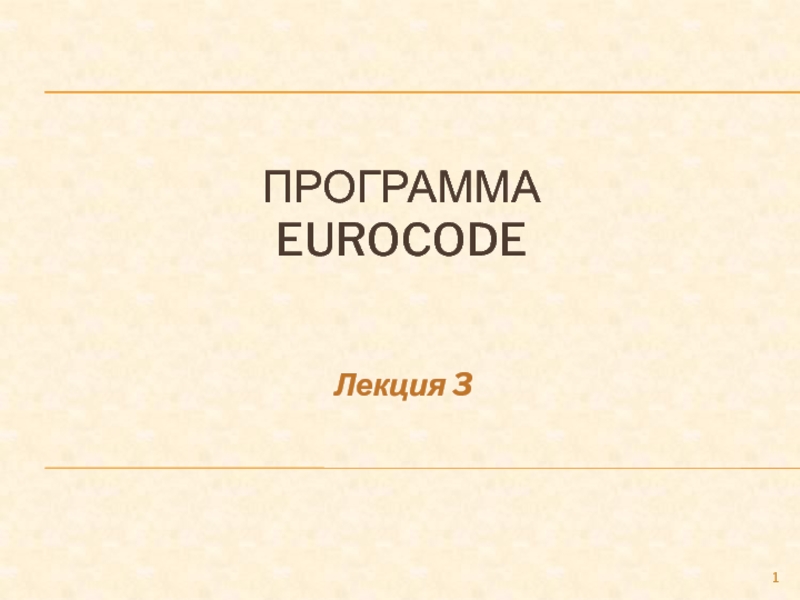
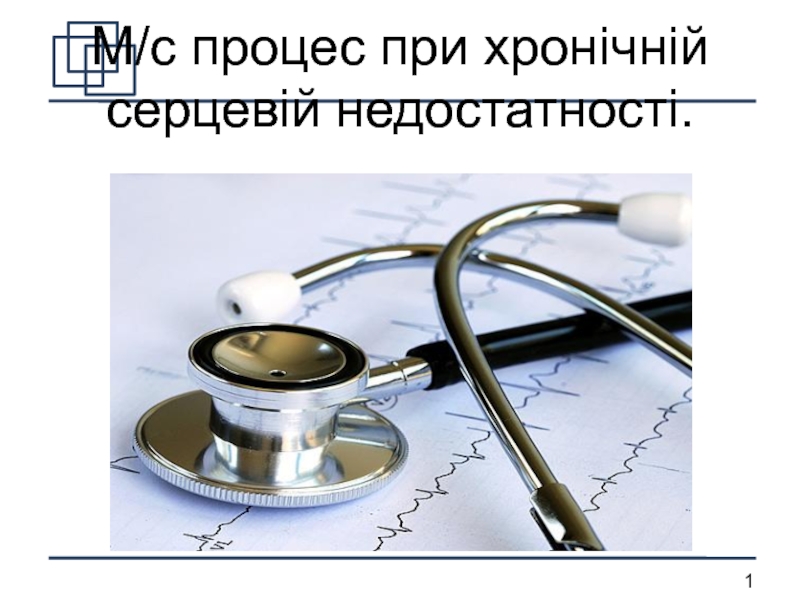
Слайд 17[N]
Tm
Сопротивление R
Рекомендованная процедура измерений
• Сопротивление может значительно колебаться, особенно
у моделей
с малым отношением Сопротивление/Водоизмещение и
большим водоизмещением
• В
этом случае осреднение проводят за 10 осцилляций
• Необходимо убедиться, что осцилляции не связаны
с появлением ускорений при движении модели
140
130
120
110
100
90
80
70
20
25
35
40
30
Время, сек]
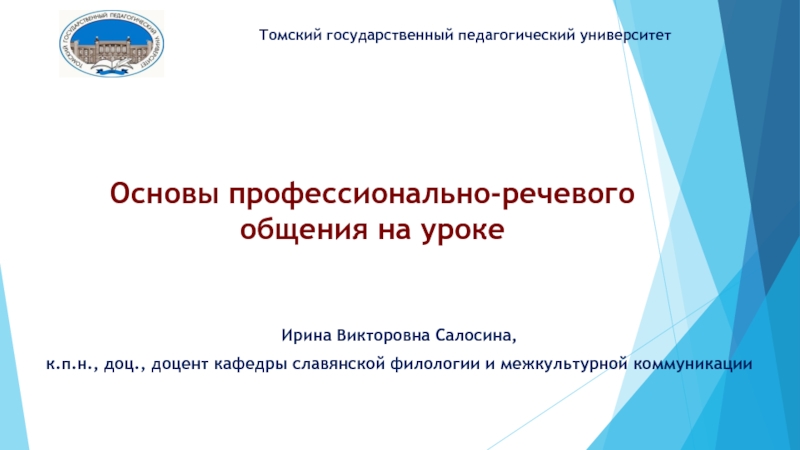
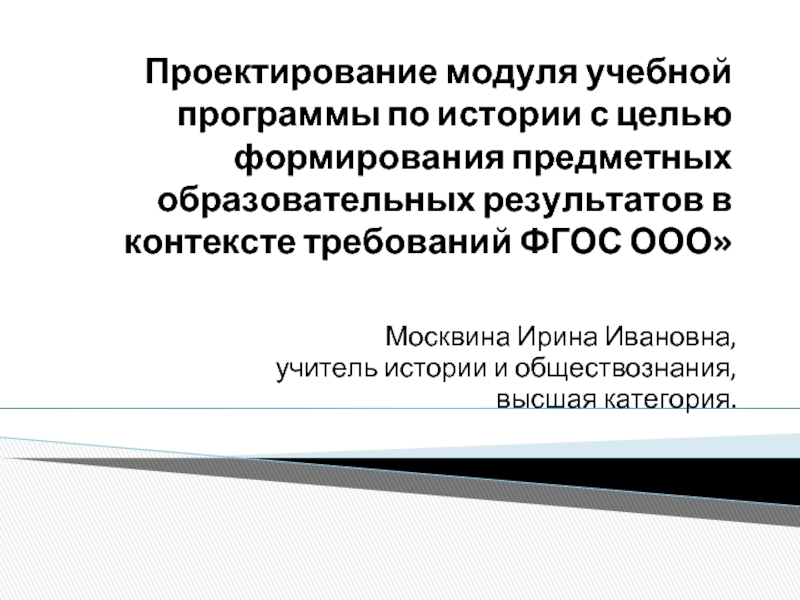
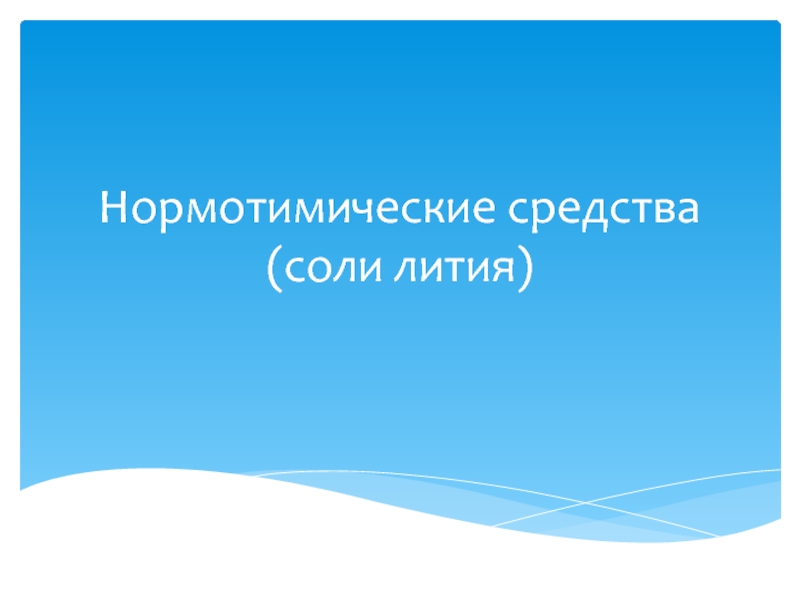
Слайд 18Сопротивление модели RTm[N]
Скорость модели[м/с]
Пример записи данных одного пробега
-40
-20
0
160
140
120
100
80
60
40
20
0
10
20
30
40
50
60
Время [секунды]
-0.5
0
2.5
2
1.5
1
0.5
RTm
Скорость
Слайд 19Сейши – стоячие волны в бассейне
Амплитуда ζa
)
ω
Длина бассейна Ltank
Горизонтальная скорость
Vx
Высота волны:
Период:
Глубина h
Горизонтальная скорость
Слайд 20Сейши – стоячие волны в бассейне
VIDEO
Слайд 21Погрешности в измерениях от стоячих волн
- Пример для крупных бассейнов:
Амплитуда
волны = 1 cм
Максимальная горизонтальная скорость Vx = 0.03
м/с
Скорость тележки Vm = 1.5 м/с
Сопротивление пропорционально:
Вызванная погрешность: 4%
Слайд 22Время выдержки между пробегами
• Волны на поверхности должны исчезнуть
–
Время ожидания можно уменьшить с помощью волногасителей
– время ожидания больше
в больших бассейнах
• Сейши должны утихнуть
– Этот процесс сложно наблюдать
– Затухают сейши особым способом
– Требуется больше времени в больших бассейнах
• Время ожидания должно обеспечить
–Тщательность и точность измерений
– производительность
• Типичный цикл пробегов в больших бассейнах: 15 минут!
Слайд 23Определение сопротивления скоростных моделей
Слайд 24Определение сопротивления скоростных моделей
VIDEO
Слайд 26Испытания движителей в открытой воде
• Винт (или другой движитель)
испытывается в открытой воде
- В случае винтов в насадке, с
насадкой
– Гондолы двигателей и трубы подруливающих устройств
должны быть представлены
– Должны быть смоделированы элементы рулевого устройства
• Измеряем
– Упор, момент на валу, число оборотов
– Скорость воды или тележки
– Тягу подруливающего устройства (если нужно)
• Для гондол и подруливающих устройств:
– тягу на всех режимах
– тяга подруливающих устройств измеряется по возможности
Слайд 27Испытания движителей в открытой воде
Слайд 28Испытания движителей в открытой воде
VIDEO
Слайд 29Испытания движителей в открытой воде
- Измерительное оборудование
Скорость воды V
ИЗМЕРЯЕМ :
Момент
Q
Упор T
Число оборотов n
Скорость V
Слайд 30Испытания движителей в открытой воде
- Процедура измерений
•
•
•
•
•
Обороты винта постоянны
Скорость тележки
варьируется от
нуля до скорости нулевого упора
Число оборотов соответствует
расчетному
при моделировании
Испытания Могут проводиться и
при более высоких числах оборотов
(моделируются возможные условия)
Результаты представлены
в безразмерном виде
Слайд 31Подтягивание FD
Пропульсивные испытания
• Процедура (Континентальный или Русский метод):
– Модель
разгоняем до требуемой скорости
– Число оборотов винта подбирается таким, чтобы
модель двигалась
со скоростью тележки
– С найденными числами оборотов проводим измерения за10 секунд
– Осредняем результаты измерений за этот период
ТЕЛЕЖКА Измеряем:
Момент Q
Упор T
RPM
Скорость
Осадки оконечностей
Динамометр
Электромотор
Слайд 32Пропульсивные испытания (Британский метод)
• Имерения те-же, но:
Измеряем силу подтягивания
•
Процедура испытаний (British method):
–
–
–
–
Модель разгоняем до нужной скорости
Устанавливаем нужное
постоянное число оборотов
Измеряем усилие подтягивания
Испытания проводят с не менее чем 3 числами оборотов
– Значения упора, момента и числа оборотовV корректируются с учетом силы подтягивания интерполяцией
• Преимущества Британского метода:
– Точное определение силы подтягивания
– Испытания со слабо и сильнонагруженными винтами
• Недостаток: Требуется на порядок больше времени!
Слайд 33Гидродинамические лотки построены на принципе
обращения движения и представляют собой замкнутые
резервуары в виде кольцевой трубы переменного поперечного сечения. Рабочий участок,
в котором расположена модель, как правило, сообщается с атмосферой. Основные достоинства гидролотков – возможность наблюдения за моделью неограниченное время, удобство визуальных съемок и приборных измерений, возможность повышения точности регистрации измеряемых величин. В то же время здесь труднее добиться равномерности потока и однородности его структуры, а также исключить гидравлический конструкции типа водосливов в конце рабочего участка со следующим за ним уклон и волнообразование свободной поверхности. Для устранения волн применяют управляемые козырьки в начале рабочего участка, подпорные участком большой емкости и другие решения. Для визуальных наблюдений в районе рабочего участка расположены смотровые окна, а над ним – платформа с измерительной аппаратурой. Как правило, эксперименты в гидролотках дополняют данные, полученные в опытовых бассейнах.
Слайд 37ПЛ «Альбакор»
Испытания модели ПЛ в аэродинамической трубе
Слайд 38Кавитационные испытания
• Назначение:
– Прогнозирование кавитационной эрозии
– Влияние кавитации на
к.п.д.
– Вибрация и шум
• Типы испытаний:
–
–
–
–
Наблюдение (визуально)
Измерение пульсаций давления
Измерение
шума
Измерение кавитационной эрозии
Слайд 44Проведение кавитационных тестов:
1.
2.
3.
4.
Назначается скорость потока в рабочей части кавитационной
трубы,
соответствующая выбранной относительной поступи , J.
Устанавливаем модель кормы и замеряем
поле скоростей в
диске винта
Устанавливаем модель винта
При атмосферном давлении в трубе регулируется либо число
оборотов, либо скорость потока, пока коэффициент момента не
станет равным полученному при пропульсивных испытаниях
Поддерживая постоянными скорость потока и число оборотов,
уменьшаем давление в трубе до нужного значения числа кавитации.
6. Проводим все измерения и фиксируем результаты.
Слайд 4524
Модель кормы в кавитационной трубе
Слайд 46352
0
345
7
30
15
45
33
0
22
5
14
3
15
165
0
157
195
180
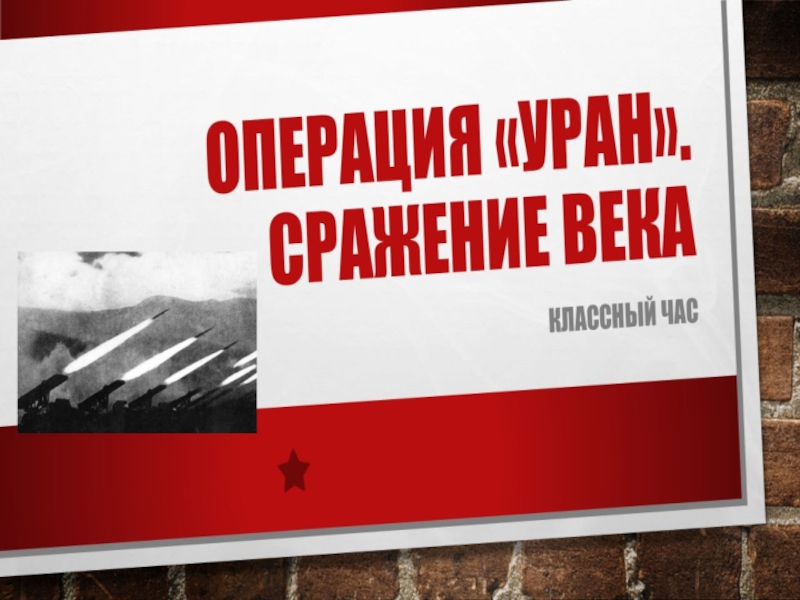
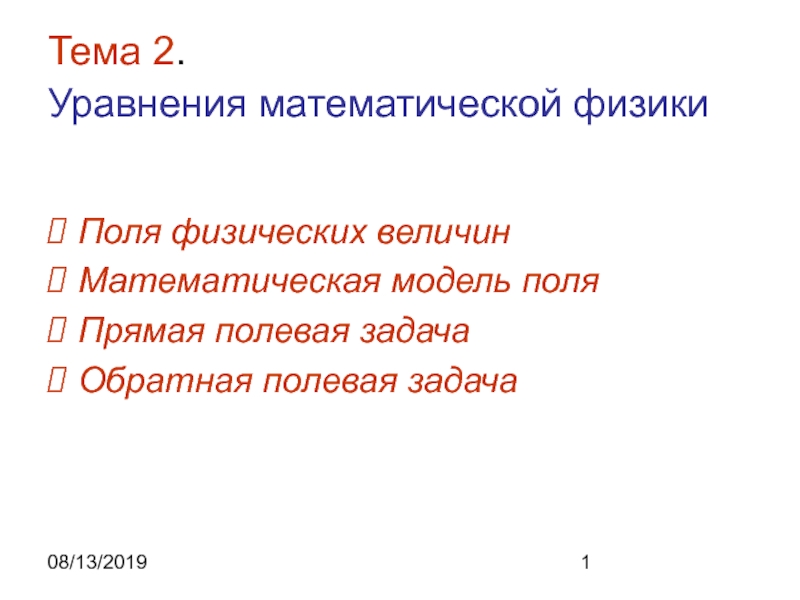
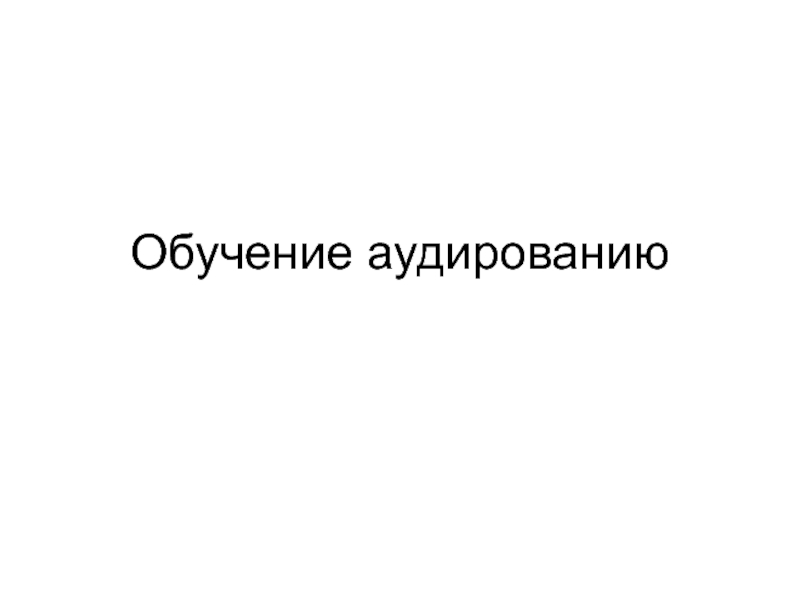
Поле скоростей
1.0
0.8
0.6
0.4
0.2
0.0
0
15
30
45
60
75
90
105
120
135
150
165
180
угол [градусы]
w
В кавитационной трубе
В опытовом бассейне
r/R=0.36
0.0
0.2
0.6
0.4
0.8
1.0
0
15
30
45
60
75
90
105
120
135
150
165
180
r/R=0.568
60
75
90
105
12
0
13
5
24
0
270
255
285
30
0
31
5
0.621
0.414
0.828
1.035
Осевая
скорость
0.50
0.45
0.40
0.35
0.30
0.25
0.20
0.15
0.10
0.05
0.00
Осевык скорости показаны
цветом
Диск винта смещен от ДП
Слайд 47Измеряем при кавитационных испытаниях:
•
Число оборотов
–
тахометром
•
•
•
•
•
•
Упор
Момент
Статическое давление в трубе
– Датчиком
статического давления
Скорость воды в трубе
– Трубкой Пито-Прандтля в 5
см от стенки трубы в рабочем участке
Для измерения пульсаций давления:
– Датчиками давлений на модели кормы
(обычно 6-18 датчиков в разных местах)
Для измерения шума винтов:
– Широкополосный гидрофон
Слайд 48Измерения:
Трубка Пито-Прандтля
Статическое давление
Мембрана
ВАЛ
Индукционный датчик
Для измерения упора
Упор
Момент
Тензометр
Для измерения крутящего момента
Слайд 51Маневренные испытания
• Две альтернативных цели:
Прямая проверка маневренности - выполнение критериев
ИМО
2. Определение гидродинамических коэффициентов для уравнений движения
• Обычно с последующим
расчетом маневренности
в программе прогноза маневрирования
• Две альтернативных схемы испытаний:
1. Тестирование свободного хода модели
• Дает прямые оценки маневренности
• Гидродинамические коэффициенты для уравнений движения
могут быть получены пересчетом
2. Тестирование модели при вынужденном движении
• Измерение сил для вычисления гидродинамических
коэффициентов для уравнений движения
Слайд 52Виды маневренных испытаний
• IMO standard maneuvers (Стандартные тесты ИМО):
–
Zig-zag (Зиг-Заг)
• 10º/ 10º на оба борта
• 20º/
20º на оба борта
– циркуляционный тест
• 35º переклада руля
– Тест полной остановки (определяется тормозной путь,
проходимый судном с момента отдачи команды на полный
задний ход до момента полной остановки судна относительно воды )
• Дополнительные маневры:
–
–
–
–
Спиральные тест
Обратная спираль
Полный выбег
Очень маленький Зиг-Заг
Слайд 54Маневр Зиг-Заг
Испытание на зигзаг 10°/10° выполняется посредством перекладки руля на
10° поочередно на каждый борт при достижении отклонения направления движения
на 10° от первоначального направления в соответствии со следующими процедурами
.1 при достижении устойчивого нулевого рыскания руль перекладывается на 10° на правый/левый борт (первое действие);
.2 когда направление движения изменится на 10° от первоначального, руль перекладывается на 10° на левый/правый борт (второе действие);
.3 после того, как руль будет переложен на левый/правый борт, судно будет продолжать поворачиваться в первоначальном направлении с уменьшающейся скоростью поворота. Затем, реагируя на перекладку руля, судно должно начать поворачиваться на противоположный борт. Когда судно достигнет отклонения на 10° на левый/правый борт от первоначального курса, руль снова перекладывается на 10° на правый/левый борт (третье действие);
.4 первый угол зарыскивания - дополнительное отклонение после второго действия) при выполнение зигзага;
.5 второй угол зарыскивания - дополнительное отклонение после третьего действия) при выполнении зигзага;
.6 испытания на зигзаг 20°/20° проводятся согласно процедуре, описанной выше, посредством перекладки руля на 20° и изменениях курса на 20°.

Слайд 58Самоходные Маневренные Испытания
•
•
•
Полное геометрическое подобие
Скорости моделируются по числу Фруда
Влияние масштабного
эффекта на силу трения компенсируется установленным вентилятором (воздушным винтом)
Электродвигатель должен
идеально моделировать работу СЭУ
– Можно использовать мотор постоянной мощности
– Нужно обеспечить постоянное число оборотов (Использование электромотора без автоматического регулирования дает слишком большой упор винта при маневрировании)
Слайд 59
- ИЗМЕРЯЕМ:
•
•
•
•
•
Число оборотов винта
Углы перекладки рулей
Скорость
Сигналы на органах управления
Положение модели
и ее посадку
– Альтернативно: 6 –ти мерная запись
• Углы поворота (с использованием гироскопов)
– Важно для быстроходных моделей и при использовании автопилота
Самоходные Маневренные Испытания
Слайд 6139
Маневренные испытания с
закрепленными моделями
• Механизм плоских движений (Planar Motion
Mechanism (PMM))
• Циркуляционный бассейн
• Буксировка с углом дрейфа
•
Измеряем:
– Скорость
– Параметры положения
– Силы и моменты
Модель совершает вынужденные движения;
Измеряем силы, прикладываемые к модели
Слайд 66Испытания на регулярном волнении.
Параметрическая качка
VIDEO
Слайд 68Механизм плоских движений
(Planar Motion Mechanism (PMM))
Слайд 69Механизм плоских движений Planar Motion Mechanism
VIDEO
Слайд 70Тест рыскания
Рыскание и дрейф
Рыскание и перекладка руля
Слайд 71Опытовые бассейны с ротативными установками служат для моделирования движения судна
по криволинейной траектории, чаще всего – на установившейся циркуляции. Они
имеют чашу круглой или прямоугольной в плане формы, в центре которой расположена колонна – опора ротативной установки. Сама установка представляет собой ферму, опирающуюся на центральную опору и рельсы по периферии бассейна. По ферме перемещается тележка, к которой крепится модель и измерительная аппаратура. Для уменьшения скорости циркуляции воды в бассейне, вызванной движением модели, на дне и стенках бассейна располагают радиальные и вертикальные ребра - пластины. Для гашения волн устанавливается волногаситель.
Слайд 72Циркуляционный бассейн
(Ротативная установка)
•
•
•
Устанавливаем:
– Скорость вращения
– Радиус вращения модели
–
Угол дрейфа модели
Контролируем :
– Постоянство скорости
– Постоянство
угла дрейфа
– Постоянство скорости вращения
Измеряем:
–
–
–
–
6 компонент сил и моментов
скорость
Радиус, угол дрейфа
Угол перекладки руля
Слайд 73Испытания модели
с фиксированным углом дрейфа
•
•
•
•
Модель буксируется в бассейне с
фиксированным углом дрейфа
Модель либо жестко закрепляется, либо может свободно накреняться
Измеряем
силы и моменты, действующие на модель
Опыты повторяют для нескольких углов дрейфа
и скоростей буксировки
• Варианты:
– Повторяем при нескольких углах перекладки руля
Слайд 74ТРЕБОВАНИЯ К МАНЕВРЕННЫМ ХАРАКТЕРИСТИКАМ
.1 Поворотливость.
При выполнении маневра на циркуляцию выдвиг
не должен превышать
4,5 длин судна (L), а тактический диаметр -
5 длин судна (L).
.2 Начальная поворотливость.
При угле перекладки руля на 10° на левый/правый борт судно не должно проходить более 2,5 длин (L) за время, в течение которого оно отклонится на 10° от своего первоначального направления движения.
.3 Рыскливость и устойчивость на курсе.
.3.1 Величина первого угла зарыскивания при испытаниях на зигзаг 10°/10° не должна превышать:
10°, если отношение L/V менее 10 с;
20°, если отношение L/V составляет 30 с или более;
(5+L/2V)° , если отношение L/V составляется 10 с и более, но менее 30 с.
.3.2 Величина второго угла зарыскивания при испытаниях на зигзаг 10°/10° не должна превышать:
25°, если отношение L/V менее 10 с;
40°, если отношение L/V составляет 30 с или более;
(17,5+0,75 L/V)°, если отношение L/V составляет 10 сиболее, но менее 30 с.
.3.3 Величина первого угла зарыскивания при испытаниях на зигзаг 20°/20° не должна превышать 25°.
.4 Тормозные характеристики.
Тормозной путь при проведении испытаний на торможение с помощью полного хода назад не должен превышать 15 длин (L) судна. Для судов большого водоизмещения эта величина может быть изменена по согласованию с Регистром.

Слайд 75МКОБ: Международная Конференция Опытовых Бассейнов
ITTC: International Towing Tank Conference
•
•
•
•
•
The ultimate
source of accumulated knowledge on model testing
Work is performed in
groups of 6-10 technical experts
Work is presented every third year in a common conference
Proceedings from the ITTC conferences are valuable references
ITTC maintains standards of model testing and analysis techniques
• ITTC Permanent web-site – contains standards for model testing:
http://ittc.sname.org/
Слайд 7645
Ship model testing - Summary
• Resistance, propulsion and propeller
open water tests are performed to
determine accurately the speed-power performance
of the ship in full
scale
• Cavitation tests are done in order to ensure that the ship propeller will
not get cavitation problems
– Typical cavitation problems are:
• erosion damage to propeller and rudder
• Noise and pressure pulses induced on the hull from the propeller cavitation
• Manoeuvring tests are performed to verify the manoeuvrability of the
ship
– Compliance with IMO criteria for manoeuvrability
– Detect and repair directional instability
















![[N]TmСопротивление RРекомендованная процедура измерений• Сопротивление может значительно колебаться, особенно у моделей с малым отношением Сопротивление/Водоизмещение и большим](/img/tmb/3/264005/67183ef8b5c8d7642d0e66c5aff8a767-800x.jpg "ИСПЫТАНИЯ МОДЕЛЕЙ СУДОВ
Экспериментальные методы морской гидромеханики [N]TmСопротивление RРекомендованная процедура измерений• Сопротивление может значительно колебаться, особенно у моделей с")
![Сопротивление модели RTm[N]Скорость модели[м/с]Пример записи данных одного пробега-40-200160140120100 80 60 40 200102030405060Время [секунды]-0.502.521.510.5RTmСкорость](/img/tmb/3/264005/f276902d7b98b4643a7a65cac201e2e7-800x.jpg "ИСПЫТАНИЯ МОДЕЛЕЙ СУДОВ
Экспериментальные методы морской гидромеханики Сопротивление модели RTm[N]Скорость модели[м/с]Пример записи данных одного пробега-40-200160140120100 80 60 40 200102030405060Время [секунды]-0.502.521.510.5RTmСкорость")
ω Длина бассейна Ltank Горизонтальная скорость VxВысота волны:Период: Глубина hГоризонтальная скорость")






 испытывается в")




: – Модель разгоняем до")
• Имерения те-же, но: Измеряем силу подтягивания• Процедура испытаний")













![35203457301545330225143151650157195180Поле скоростей1.00.80.60.40.20.00153045607590105120135150165180угол [градусы]wВ кавитационной трубеВ опытовом бассейне r/R=0.360.00.20.60.40.81.00153045607590105120135150165180r/R=0.5686075 90105120135240270 2552853003150.6210.4140.8281.035Осевая скорость0.500.450.400.350.300.250.200.150.100.050.00Осевык скорости показаны цветомДиск винта смещен от ДП](/img/tmb/3/264005/97d4762c52971ee37ed28b7e26cc387b-800x.jpg "ИСПЫТАНИЯ МОДЕЛЕЙ СУДОВ
Экспериментальные методы морской гидромеханики 35203457301545330225143151650157195180Поле скоростей1.00.80.60.40.20.00153045607590105120135150165180угол [градусы]wВ кавитационной трубеВ опытовом бассейне r/R=0.360.00.20.60.40.81.00153045607590105120135150165180r/R=0.5686075 90105120135240270 2552853003150.6210.4140.8281.035Осевая скорость0.500.450.400.350.300.250.200.150.100.050.00Осевык скорости показаны цветомДиск винта смещен от ДП")





: – Zig-zag (Зиг-Заг) •")














)")



•••Устанавливаем: – Скорость вращения – Радиус вращения модели – Угол дрейфа моделиКонтролируем")