технологических параметров, контроля и сигнализации, комбинационного (ситуационного) управления, снабженные текстовым
описанием.Требования к составлению алгоритмической схемы в дипломном проекте:
Обозначения выполняются по ГОСТ 19.701-90
Для каждой программы составляется отдельная алгоритмическая схема
Вложенные циклы в алгоритмах для программ ПЛК не допускаются!
Блоки «начало» и «конец» присутствуют всегда!
Программы ПАЗ, аварийной сигнализации и регулирования объединять нельзя!
Каждый алгоритм снабжается текстовым описанием.
Текстовые пояснения выполняются по РД 50-34.698-90 и должны включать наименование алгоритма, его назначение, перечень входных и выходных массивов информации (входные и выходные переменные), взаимосвязь с алгоритмами других программ (если она есть) и описание его логической структуры, т.е. способа формирования результатов решения с указанием последовательности этапов расчета, расчетных и (или) логических формул, используемых в алгоритме.
В схемах вместо текстовых формулировок рекомендуется применять обозначения в виде переменных с указанием присваиваемых или анализируемых значений.
Абстрактные формулировки типа «регулируем», «увеличить подачу газа» и т.д. и т.п. не допускаются!
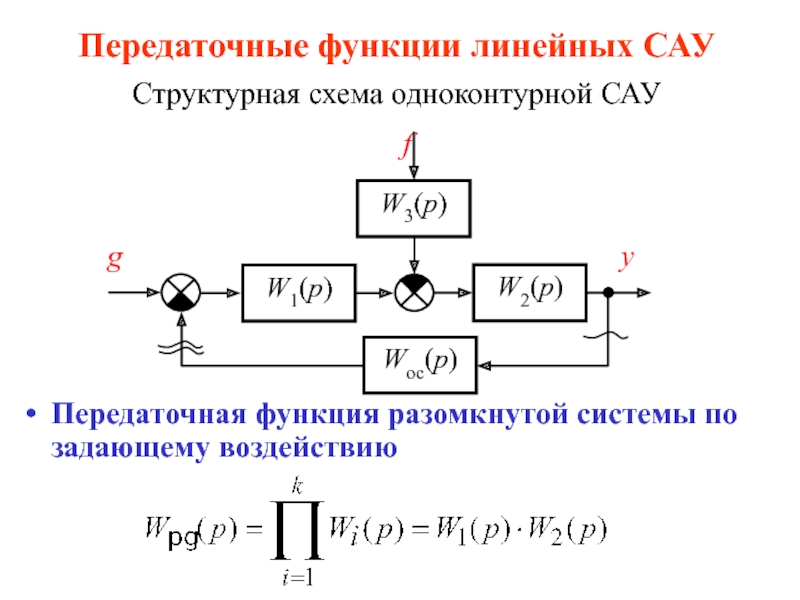
Содержание подраздела: схемы программ регулирования технологических")
Алгоритм программы ПИД-регулирования температурыВходными данным для")
Tpv – измеренная температураON – управление реле")

Содержание подраздела: скриншот разработанного интерфейса (запущенного на исполнение")
Содержание подраздела: скриншоты либо листинги программ, а")
В результате вычисления рассогласования по температуре как")
Пример программы табличного управления на языке STПрограмма")
Пример программы каскадного ПИД-регулирования; ИУ – клапан")
Пример программы двухпозиционного регулирования уровня: ИУ-электродвигатель насосаПоддержание")
Содержание подраздела: приводится скриншот навигатора проекта в развернутом")
Пример навигатора проекта2 узла (АРМ и контроллер), аппаратные")
Создадим узел типа RTM с поддержкой графических экранов")
Пример настройки аппаратных теговНастройка параметров аппаратного тега, описывающего")