Слайд 1*
Розділ IV
“Експлуатація і ремонт радіоелектронного обладнання літаків, вертольотів та авіаційних
ракет”
Тема 10. “Радіолокаційні станції авіаційних комплексів“
Доцент кафедри
кандидат технічних
наук, доцент Войчук В. А.
Київ 2012
НАЦІОНАЛЬНИЙ АВІАЦІЙНИЙ УНІВЕРСИТЕТ
Житомирський військовий інститут ім. С.П.Корольова
Кафедра бойових авіаційних комплексів та радіотехнічного забезпечення
Слайд 2*
РЛС авіаційних ударних і військово-транспортних комплексів.
РЛС авіаційних комплексів перехоплення повітряних
цілей.
РЛС авіаційних розвідувальних комплексів.
Робота РЛС у складі прицільно-навігаційних систем і
систем управління озброєнням.
Навчальна та виховна мета
Ознайомити з принципами побудови, особливостями та способами отримання інформації про цілі в РЛС авіаційних комплексів
2. Виховувати у студентів – майбутніх фахівців авіації Повітряних Сил ЗСУ самостійність, творчу ініціативу, наполегливість та високу відповідальність за якісну організацію технічної експлуатації та вміле бойове застосування автономних засобів радіонавігації.
Навчальні питання
Слайд 3Контрольні завдання (РЛС АК)
Обгрунтуйте співвідношення між дальностями дії двохкоординатної наземної
РЛС контролю повітряного простору та цілевказання і наземного радіовисотоміру (1
бал).
Співставте залежність від дальності довжини пачок відбитих сигналів в РЛС секторного огляду та в РЛС бокового огляду з нерухомою продовжфюзеляжною антеною (1 бал).
Намалюйте і поясніть траєкторію переміщення відмітки цілі на екрані панорамної РЛС бомбардувальника при боковому вітрі та при правильній і неправильній боковій наводці на ціль (1 бал).
Обгрунтуйте залежність ефективності синтезування апертури від зміни положення ДСА РЛС в азимутальній площині (1 бал).
Чому у ФАР не здійснюється фокусування по дальності (1 бал)?
Поясніть, чому панорамні РЛС ударних і військовотранспортних літаків двохкоординатні, а РЛС винищувачів трьохкоординатні (1 бал).
Чому зона огляду РЛПК стабілізується у просторі і має вигляд прямокутника, велика сторона якого паралельна підстилаючій поверхні (1 бал)?
Чому при механічному скануванні ДСА рядки пошуку орієнтуються горизонтально, а при змішаному електронно-механічному – вертикально (1 бал)?
Примітка. Мінімальна сума балів по цій темі для отримання позитивної оцінки – 3.0.
Максимальна сума зарахованих балів по темі – 5.0.
Обгрунтуйте співвідношення між дальностями дії двохкоординатної наземної РЛС")
Слайд 4*
1. РЛС авіаційних ударних і військово-транспортних комплексів
Ударні авіаційні комплекси (УАК)
Інформаційна
ланка (ІЛ) (засоби розвідки, засоби навігації, засоби метеоспостережень, карти, інші
доступні джерела інформації) забезпечує командира необхідною попередньою і оперативною інформацією для планування і виконання бойових завдань та оцінки їх результатів.
Командний пункт (КП) здійснює планування операцій, бойових дій та окремих ударів, постановку завдань, управління виділеними силами та аналіз результатів виконання завдань.
Авіаційна ударна група (АУГ) з окремих літаків або груп ударних літаків - активна складова комплексу і виконує бойові завдання шляхом застосування авіабомб, ракет та крилатих ракет, артилерійської зброї, мін і торпед, інших засобів вогневого та іншого впливу на противника.
Авіаційні ударні комплекси призначені для знищення наземних (підземних) та надводних (підводних) цілей на території противника або в акваторії.
Слайд 5*
Особливості бойового застосування УАК
Віддаленість об'єктів ударів від місць базування:
- на протязі майже всього часу польоту нема контакту
з об'єктами ударів, за час польоту можливі зміни стану об'єктів, їх положення;
- утруднене управління АУГ з КП при польоті до цілей і в районах цілей обумовлює автономність дій екіпажів при польоті до цілей, виборі цілей, способів їх враження і зброї;
- дійсна обстановка в районах ударів може суттєво відрізнятись від обстановки на момент постановки бойових завдань.
2. Більшість часу виконання бойового завдання АУГ знаходиться над територією противника:
- інтенсивна протидія засобів ППО, особливо поблизу ЛБЗ і в районі об'єкту;
- утруднене управління;
- відсутність навігаційного забезпечення.
3. Положення нерухомих об'єктів відомо заздалегідь.
Через можливість кардинальної зміни обстановки призначаються запасні цілі.
Можливі повторні атаки в залежності від наслідків попередніх.
Слайд 6*
Етапи виконання бойового завдання
Уяснення завдання і підготовка до його виконання
(маршрут та профіль полоту, навігаційне забезпечення, організація зв'язку, способи і
порядок нанесення ударів, вибір зброї і порядку її застосування, способи протидії засобам ППО, порядок застосування засобів РЕБ, організація і порядок взаємодії).
Політ в район цілі, уточнення погоди в районі цілі.
Пошук та виявлення цілі, встановлення стану цілі, уточнення об'єктової ППО.
Підготовка до атаки: вибір основної та запасної цілей, способів ураження, вибір зброї і порядку її застосування, способів та прийомів протидії засобам ППО і РЕБ.
Атака цілі і документування її результатів, повторні атаки.
Повернення на аеродром базування.
Слайд 7Військово-транспортні авіаційні комплекси (ВТАК)
підготовки та ведення бойових дій над своєю
територією (акваторією), над територією інших країн, над нейтральними водами і
над територією (акваторією) противника.
Інформаційна ланка ІЛ (засоби розвідки, засоби навігації, засоби метеоспостережень, карти, інша доступна інформація) забезпечує необхідною попередньою і оперативною інформацією для планування, виконання і оцінки результатів виконання бойових завдань.
Командний пункт КП здійснює планування операцій, бойових дій та окремих вильотів, постановку завдань, управління виділеними силами та аналіз результатів виконання завдань.
Військово-транспортна група ВТГ з окремих літаків або груп транспортних літаків є активна складова комплексу і здійснює всі види військових перевезень.
ВТГ, на відміну від АУГ, здійснює доставку (перевезення або десантування) військових вантажів та особового складу, а не враження об'єктів противника. Тому ВТ літаки мають тільки зброю для власного захисту від ураження засобами ППО.
ВТАК призначені для перевезень військових вантажів та особового складу з військовою технікою і озброєнням або без них на всіх етапах
підготовки та ведення бойових дій над своєю територією")
Слайд 8РЛС ударних і військово-транспортних комплексів
Наземні РЛС
РЛС дальнього виявлення і
контролю повітряного простору (2-х координатні з радіовисотомірами або 3-х координатні.
РЛС
систем посадки.
Метеорологічні РЛС.
Запитувачі радіолокаційних систем розпізнавання та систем з активною відповіддю.
Бортові РЛС
Панорамна РЛС переднього огляду (РЛС ПО).
РЛС захисту хвоста.
РЛС забезпечення маловисотного чи профільного польоту (РЛС МВП чи РЛ ПП).
Пасивні РЛС систем управління зброєю, розвідки і РЕБ.
Запитувачі і відповідачі радіолокаційних систем розпізнавання.
РЛС забезпечення польоту строєм та недопущення зіткнення.
РЛС навігаційних систем – запитувачі, відповідачі, доплерівські вимірювачі швидкості і кута зносу (ДВШКЗ), радіовисотоміри.
Ракетні РЛС
Радіолокаційні голівки самонаведення (РГС).
Радіопідірвачі (РП).
Радіовисотоміри (РВ).
РЛС забезпечення маловисотного чи профільного польоту.
Слайд 9 Бортовий прицільно-навігаційний комплекс УАК і ВТАК
ЛРЗ – літаковий радіолокаційний
запитувач
ЛРВ – літаковий радіолокаційний відповідач
ЛВ – літаковий відповідач
ПРЛС –
панорамна РЛС
ЕОВ – електронно-оптичний візир
ТВВ – телевізійний візир
РЛПП – радіолокатор профільного польоту
ЕОМ – електронна обчислювальна машина
КЗ – комплекс зв'язку
БКО – бортовий комплекс оборони
САУ – система автоматичного управління
СЄІ – система єдиної індикації
СУЗ – система управління зброєю (десантуванням)
ПНС – пілотажно-навігаційна система
Автономні джерела інформації про обстановку – ЛРЗ, ПРЛС, ЕОВ, ТВВ, РЛПП, БКО.
Додаткове джерело інформації про обстановку – КЗ.
Джерела інформації для пілотування і літаковождіння – ПРЛС, РЛПП, ПНС.
Комплексна обробка і узагальнення інформації, підготовка рекомендацій та управління комплексом – ЕОМ.
Користувачі інформації – САУ, СЄІ (екіпаж), СУЗ, ПНС.
Обмін оперативною інформацією із своїми об'єктами – ЛРЗ, ЛВ, ЛРВ, КЗ.
Слайд 10*
Бортові панорамні РЛС
Задачі і режими роботи
Задачі бортових панорамних РЛС
Бортові панорамні
РЛС шляхом секторного (раніше – кругового) огляду підстилаючої поверхні забезпечують:
Отримання
радіолокаційної карти підстилаючої поверхні, яка використовується для виявлення і розпізнавання орієнтирів і об'єктів та визначення їх координат; ця інформація потрібна для рішення навігаційних задач, для виявлення цілей і прицілювання при застосуванні зброї і при десантуванні.
Цілевказання ГСН ракет і спряженим системам.
Виявлення і визначення координат радіомаяків.
Виділення рухомих цілей і визначення їх характеристик.
Виявлення небезпечних метеоявищ.
Визначення дальності по зовнішньому цілевказанню.
Отримання інформації про рельєф місцевості.
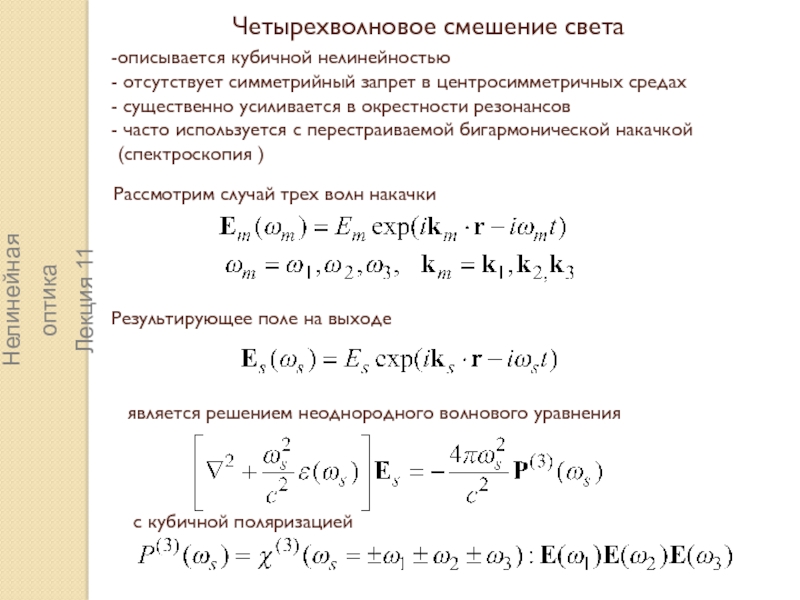
Слайд 11*
Режими роботи бортових панорамних РЛС
Огляд поверхні у режимах план місцевості
(ПМ) у дрібному масштабі або мікроплан місцевості (МПМ) у крупному
масштабі із застосуванням нерухомого або рухомого вікна.
Маяк – робота в режимі з активною відповіддю з радіомаяками-відповідачами з відомими координатами для визначення положення літака відносно маяка.
Селекція рухомих цілей (СРЦ).
Доплерівське загострення діаграми спрямованості антени (ДСА).
Синтезування штучної апертури (СА).
Супроводження наземної цілі (ділянки підстилаючої поверхні з ціллю).
Супроводження надводної цілі.
Слайд 12Особливості побудови і ТТХ ПРЛС
Особливості побудови ПРЛС
Двохдіапазонність
(см та мм діапазони) суттєво покращує ТТХ ПРЛС.
Імпульсний режим роботи
з некогерентними (застарілі ПРЛС) або когерентними (сучасні ПРЛС) зондуючими сигналами.
ПРЛС двохкоординатні (азимут – дальність).
Визначення координат об'єктів при огляді по масштабним міткам азимуту і дальності (грубо) та накладанням на об'єкт візира, прицільного перехрестя (точно).
Супроводження ділянки поверхні з об'єктом, а не самого об'єкту:
в старих ПРЛС напівавтоматичне (з участю оператора), непрямим методом, шляхом накладання маркера (у вигляді лінії візування та кільця дальності) і синхронізації його переміщення,
в сучасних ПРЛС автоматичне, кореляційно-екстремальним методом по відповідним алгоритмам ЕОМ.
Сутність кореляційно-екстремального методу :
обчислюється коефіцієнт кореляції між еталонним (або попереднім) і поточним зображеннями ділянки місцевості,
зображення зміщуються одне відносно одного до максимуму кореляції між ними.
Слайд 13*
Огляд секторний, в сучасних ПРЛС – у передню напівсферу з
можливістю управління положенням і розмірами сектору.
Для вирівнювання інтенсивності сигналів з
різних дальностей спеціальна (косекансна) форма діаграми спрямованості антени (ДСА) з підстроюванням її параметрів до висоти польоту Н і обраного діапазону дальностей Dmin…Dmax.
Логарифмічна амплітудна характеристика приймача
UВих=logUвх
виключає його перевнтаження і зменшує динамічний діапазон амплітуд сигналів на виході.
Трьохтоновий (чорне, сіре, біле) підсилювач відеосигналів з ручним регулюванням порогів та підсилення збільшує контраст і полегшує розпізнавання об'єктів.
Перерахунок визначених похилих дальностей D всіх обєктів в горизонтальні дальності DГ усуває нелінійні викривлення зображення отриманої панорами:
Слайд 14*
При крені γ літака, який здійснює зондування поверхні з висоти
Н, ось сканування антени відхиляється від вертикалі на кут γ
і перетинається з поверхнею ліворуч або праворуч проекції лінії шляху літака. Тому вершина сектору теж зміститься ліворуч або праворуч, а ширина сектору збільшиться: αγ>α0 .
При тангажі θ літака, який здійснює зондування поверхні з висоти Н, ось сканування антени відхиляється від вертикалі на кут θ і перетинається з поверхнею та проекцією лінії шляху літака, але точка перетинання зміщається вперед або назад. Тому вершина сектору теж зміститься вперед або назад, а ширина сектору збільшиться: αθ>α0..
Для усунення викривлень панорами місцевості по цим причинам стабілізують антену у просторі або компенсують викривлення апаратурним чи алгоритмічним способом.
Слайд 15*
Основні ТТХ ПРЛС
Діапазони робочих хвиль - 3 см, 2.5 см,
2 см та 8 мм.
Зона пошуку – передня напівсфера.
Сектор пошуку
– 60о … 80о (ПМ), 10о … 30о (МПМ).
Період пошуку – 2 … 5 секунд.
Дальність дії – від D=HПольоту до 400 … 450 км.
Частота повторення – сотні герців … одиниці кілогерців.
Тривалість зондуючих сигналів - частини … одиниці мікросекунд.
Потужність передавача – десятки … сотні кіловатів.
Ширина ДСА – частини … одиниці градусів.
Режим випромінювання – некогерентний або когерентний імпульсний.
Режими роботи – маяк, пошук (план місцевості - ПМ), прицілювання (мікроплан місцевості - МПМ), маловисотний політ (МВП), управління зброєю.
Слайд 16*
Застосування ПРЛС у складі ПНС
Прицілювання при бомбардуванні
З балістичних таблиць відомі
відставання Δ бомби після її скидання і характеристичний час Т
падіння бомби з висоти Н. Нахил μ (у радіанах) площини візування
і кут ε відхилення напрямку на точку падіння від проекції лінії шляху:
При шляховій швидкості W і куті зносу α скидання бомби здійснюється при куті візування цілі φСК
Слайд 17*
При застосуванні оптичного прицілу бомбардування (ОПБ) нахил площини візування (бокова
наводка) здійснюється нахилом самого прицілу відносно осі літака до співпадіння
продольної мітки з ціллю.
Шляхову швидкість визначають синхронізацією переміщення поперечної мітки після її накладання на ціль (продольна наводка). Момент скидання визначається по співпадінню поточного кута візування цілі φ з розрахунковим.
Обмеження в застосуванні ОПБ: необхідність оптичної видимості цілі і технічна неможливість реалізувати великі кути візування цілі, дефіцит часу на прицілювання.
За допомогою ПРЛС на великих дальностях виявляють та розпізнають ціль. За допомогою електронного перехрестя з поперечної (дальність) і продольної (лінія візування) марок, яке відображається системою індикації, здійснюються попередні синхронізація і бокова наводка. Ця інформація вводиться в обчислювач ОПБ. При оптичній видимості цілі і її попаданні в поле зору ОПБ уточнення прицілювання і скидання бомб здійснюється засобами ОПБ.
Слайд 18*
При застосуванні ПРЛС оператор вручну переміщує лінію візування
(ЛВ) в положення, при якому відмітка цілі переміщується вздовж неї
або паралельно їй – визначається кут зносу αЗН. Ручками положення і синхронізація спряженого з ПРЛС ОПБ накладає кільце дальності (D) на ціль і утримує на ній – визначається шляхова швидкість W. Радіовисотомір видає істинну висоту польоту Н.
Обчислювач видає потрібне поточне значення азимуту цілі ξП= αЗН+ ε
яке управляє лінією прицілювання (ЛП). ЛП разом з кільцем дальності (D) створюють прицільне перехрестя. Ділянка місцевості і розміщена на ній ціль в режимі мікроплан відображаються в дакартових координатах “азимут – дальність” у крупному масштабі. Шляхова швидкість знаходиться як похідна від горизонтальної дальності
Похила дальність скидання становить
ПРЛС застосовується для прицілювання при відсутності оптичної видимості цілі, а при її наявності – для попереднього визначення прицільних даних, які забезпечують початкову орієнтацію оптичної осі ОПБ на ціль і його початкову синхронізацію. Для остаточного прицілювання і скидання застосовується ОПБ, як більш точний засіб.
 в")
Слайд 19*
Авіаційні комплекси перехоплення повітряних цілей (АКППЦ)
2. РЛС авіаційних комплексів перехоплення
повітряних цілей
АК перехоплення повітряних цілей призначені для перехоплення і знищення
пілотуємих та безпілотних літальних апаратів. Вони також залучаються для враження наземних (надводних) цілей в простих метеоумовах і ведення розвідки.
Пункт спостереження (ПС) здійснює контроль повітряного простору у призначеній зоні відповідальності – виявляє та розпізнає повітряні цілі, визначає їх координати, параметри руху та інші характеристики.
Командний пункт (КП), пункт управління (ПУ) чи пункт наведення (ПН) по інформації від ЦКП, сусідніх КП, підпорядкованих ПС, винищувачів та власних засобів спостереження здійснює аналіз повітряної обстановки, розподіл цілей між винищувачами, здійснює наведення винищувачів на призначені цілі, видає цілевказання екіпажам і бортовим засобам.
Винищувачі (активні засоби комплексу) відповідно командам наведення виходять в призначений район, виявляють, визначають параметри та ідентифікують цілі, атакують та знищують призначені цілі.
Слайд 20*
ЗАВ – запитувач активної відповіді
НРЛС – наземна РЛС
НРВ – наземний
радіовисотомір
НРЗ – наземний радіолокаційний запитувач
РЛ – радіолінія
ТОН – термінал офіцера
наведення
КРЛ – командна радіолінія
КРС – командна радіостанція
БАРУ – бортова апаратура радіовізування та управління
СЄІ – система єдиної індикації
СУО – система управління озброєнням
СУЗ – система управління зброєю
САУ – система автоматичного управління
ЛРЗ – літаковий радіолокаційний запитувач
Обладнання пунктів спостереження (ПС), командних пунктів (КП) та винищувачів
Слайд 21*
Дії складових комплексу перехоплення повітряних цілей і засоби, які для
цього залучаються
ПС: виявлення, координати і параметри цілей, класифікація, розпізнавання –
НРЛС, НРВ, НРЗ;
спостереження за винищувачами - НРЛС, НРВ, ЗАВ, НРЗ;
об'єднання, обробка і передача інформації на КП – ЕОМ, РЛ.
КП: збір і об'єднання інформації про повітряну обстановку – РЛ, ЕОМ, ТОН;
відображення обробленої інформації – ТОН;
відпрацювання рішення на бойові дії (наряд сил, розподіл цілей) – ЕОМ;
формування і передача команд наведення – ЕОМ, ТОН, КРЛ, КРС,
В-ч: вихід у район цілі – БАРУ, КРС, ЕОМ, СУО, СЄІ, САУ;
виявлення, розпізнавання, визначення координат і параметрів руху – СУО, ЛРЗ, СЄІ;
прицілювання, цілевказання ГСН, застосування зброї, вихід з атаки – СУО, СУЗ, ЛРЗ, САУ, СЄІ, ЕОМ.
Слайд 22Наведення винищувачів
Мета наведення – виведення винищувача в район призначеної для
атаки цілі в положення, при якому ціль можна буде виявити
бортовими засобами по зовнішньому цілевказанню або без нього.
Наведення здійснюється в горизонтальній площині наземними (корабельними) автоматизованими системами, які мають засоби:
- контролю повітряного простору,
- аналізу повітряної обстановки,
- визначення доцільних рішень на ведення бойових дій,
- автоматизованої передачі рішення, команд наведення і цілевказання.
Автоматичне наведення здійснюється бортовими системами винищувача по інформації і командам з КП, що надходять по каналам телекодового зв'язку. Екіпаж контролює процес наведення і може втручатись в нього. Літак пілотує система автоматичного управління (САУ).
Напівавтоматичне (директорне) наведення здійснюється аналогічно, але літак пілотується вручну по інформації від обчислювача САУ.
Наведення голосом (з мікрофоном) здійснюється шляхом передачі команд по каналам командного телефонного радіозв'язку і ручного виконання екіпажем команд наведення.
Слайд 23*
Методи наведення винищувачів
Погоня – винищувач наводиться так, щоб продовження його
осі проходило через ціль. Він вимушений здійснювати маневр, навіть коли
ціль не маневрує, і виводиться у хвіст цілі. Перевантаження винищувача більші перевантажень цілі, що може зірвати наведення. Не потребує спеціального обладнання на КП і на борту. Команди наведення передаються через радіостанцію.
Паралельне зближення – винищувач наводиться так, щоб лінія візування неманевруючої цілі переміщувалась паралельно самій собі. Перехоплення неманевруючої цілі здійснюється без перевантажень.
Пропорційне зближення - винищувач наводиться так, щоб його кутова швидкість ωВ була пропорційна кутовій швидкості обертання лінії візування цілі ωЛВ. При перехопленні неманевруючої цілі цей метод переходить в метод паралельного зближення.
Слайд 24*
Радіоелектронний комплекс винищувача
СУО – система управління озброєнням
ЛРЗ – літаковий радіолокаційний
запитувач
ЛРВ – літаковий радіолокаційний відповідач
РЛПК – радіолокаційний прицільний комплекс
ОЕПС –
оптико-електронна прицільна система
ТП – теплопеленгатор
ЛД – лазерний дальномір
БАРУ – бортова апаратура радіовізування і управління
ЛВ – літаковий відповідач
ЕОМ – електронна обчислювальна машина
ТКЗ – типовий комплекс зв'язку
БКО – бортовий комплекс оборони
САУ – система автоматичного управління
СЄІ – система єдиної індикації
СУЗ – система управління зброєю
ПНС – пілотажно-навігаційна система
Слайд 25*
Функції складових комплексу винищувача
Автономні джерела інформації про обстановку – ЛРЗ,
РЛПК, ТП, ЛД, БКО.
Неавтономні джерела інформації про обстановку – БАРУ,
ТКЗ.
Джерела інформації для пілотування і літаковождіння – РЛПК, БАРУ, ТКЗ, ПНС.
Комплексна обробка і узагальнення інформації, підготовка рекомендацій та управління комплексом – ЕОМ.
Користувачі інформації – САУ, СЄІ (екіпаж), СУО, СУЗ, ПНС.
Обмін оперативною інформацією із своїми об'єктами – ЛРЗ, ЛВ, ЛРВ, ТКЗ.
Система управління озброєнням (СУО) винищувача:
через САУ приймає участь в управлінні літаком на всіх етапах;
здійснює збір, обробку та відображення через СЄІ інформації про повітряну обстановку, зброю і команди управління;
аналізує повітряну обстановку, видає рекомендації про порядок атаки цілей, забезпечує прицілювання і цілевказання для зброї, формує команди управління зброєю, забезпечує вихід з атаки;
готує до застосування і через СУЗ управляє застосуванням зброї.
Слайд 26*
Радіолокаційний прицільний комплекс (РЛПК) і оптико-електронна прицільна система (ОЕПС) забезпечують
перехоплення і знищення повітряних цілей автономно або у взаємодії. При
взаємодії одна з систем являється ведучою, її підтримує друга (ведома) система. Ведучий комплекс обирає екіпаж з урахуванням вибраної зброї для ураження цілі.
РЛПК може застосовуватись в будь-якій метеообстановці для знищення цілей в діапазоні висот від гранично малих до максимальних при атаці цілі в її ПНС чи ЗНС в складній перешкодовій обстановці із застосуванням ракет з ТГС, з РГС та гармати.
ОЕПС застосовується в ПМУ для знищення цілей ракетами з ТГС та гарматою, але тільки не на фоні інтенсивного ІЧ випромінювання іншими об'єктами. Ракети з ТГС застосовуються тільки для враження цілей в їх ЗНС.
Система управління озброєнням винищувача
Слайд 27Радіолокаційний прицільний комплекс (РЛПК)
Склад РЛПК
Імпульсно-доплерівська трьохкоординатна РЛС контролю повітряного простору,
прицілювання та управління зброєю.
Система єдиної індикації (СЄІ).
Цифрова обчислювальна система (ЦОС).
Задачі
основні
Пошук (по ЦВ або автономно), виявлення, визначення координат і параметрів руху (грубого і точного) повітряних рухомих цілей в складній перешкодовій обстановці.
Аналіз перешкодової обстановки і вибір оптимальних параметрів і режимів роботи.
Ідентифікація виявлених цілей і організація їх державного розпізнавання.
Організація бортового наведення.
Визначення приорітетності цілей і рекомендацій щодо їх атаки.
Забезпечення прицілювання по вибраній цілі.
Розрахунок зони пусків ракет.
Цілевказання зброї та іншим системам.
Підсвітлювання цілі напівактивним РГС і передача команд радіокорекції.
Вихід з атаки.
Слайд 28*
Задачі додаткові
Отримання радіолокаційної карти місцевості.
Пошук, виявлення, визначення координат і параметрів
руху наземних (надводних) цілей
Виявлення небезпечних метеоявищ,
Отримання інформації про рельєф підстилаючою
поверхні і забезпечення маловисотного польоту.
Слайд 29Особливості побудови РЛПК
Режим випромінювання:
а) при огляді повітряного простору і
підстилаючої поверхні – імпульсно-доплерівський з ВЧП або СЧП при контролі
повітряного простору та з НЧП при контролі підстилаючої поверхні;
б) при підсвітлюванні цілі – квазібезперервний.
Усунення зон непрозорості по дальності і швидкості – перебором спеціально підібраних частот повторення.
Огляд повітряного простору – горизонтальними рядками при механічному скануванні ДСА або вертикальними рядками при змішаному електронно-механічному скануванні.
Сектор пошуку цілей орієнтується по зовнішньому або внутрішньому цілевказанню, розміри сектору визначаються помилками цілевказання.
Сектор пошуку цілей стабілізовано у просторі.
Головний пелюсток ДСА при огляді повітряного простору голчатий, а при огляді підстилаючої поверхні – вузький в горизонтальній площині і широкий спеціальної форми – в вертикальній. Спеціальна форма ДСА в вертикальній площині створюється методом парціальних діаграм.
Кутовими координатами φГ та φВ цілей при огляді вважається положення осі ДСА в моменти їх спостереження (виявлення і вимірювання координат). Якщо ціль спостерігається при декількох сусідніх положеннях ДСА, то напрямком вважається усереднене положення ДСА.
 при огляді повітряного простору і підстилаючої")
Слайд 30Поточна інформація про крен (γ) антени і кути відхилення по
горизонталі (φГ) і вертикалі (φВ) видається в ЕОМ паралельним позиційним
кодом.
Дальність цілей визначається імпульсним методом з усуненням неоднозначності шляхом перебору частот повторення, в окремих випадках (при малій скважності) - частотним методом.
Швидкість зближення з цілями визначається доплерівським методом з усуненням неоднозначності перебором частот повторення.
В режимі огляду повітряного простору в ЕОМ здійснюється супроводження “на проході” (СНП) траєкторій обмеженої кількості виявлених цілей по спрощеним алгоритмам (α-β-фільтрів) або фільтром Калмана. Отримана інформація про траєкторії цілей використовується для відображення тактичної обстановки.і спрощує перехід до супроводження по координатам вибраної для атаки цілі. Якщо точність СНП достатня, то РЛПК може забезпечити одночасну атаку кількох цілей.
Пеленг цілі при її супроводженні по координатам визначається амплітудним моноімпульсним методом з модуляційним ущільненням каналів і сумарно-різницевою обробкою. В контурі управління антеною обробка помилок супроводження здійснюється α-β-фільтром.
Супроводження цілі по дальності і радіальній швидкості здійснюється шляхом порівняння за допомогою часового і частотного дискримінаторів сигналів на виходах двох розстроєних каналів дальності і двох розстроєних каналів швидкості.
 антени і кути відхилення по горизонталі")
Слайд 31*
В контурах управління слідкуючих систем обробка помилок супроводження здійснюється α-β-фільтрами.
Управління
скануванням антени з електромеханічним скануванням при огляді здійснюється шляхом відслідковування
антеною послідовно задаваємих дискретних напрямків.
Антена двохдзеркальна з поворотом площини поляризації і трьома степенями свободи – по крену γ, азимуту φГ і куту місця φВ.
В щільових антенах сканування ДСА у вертикальній площині здійснюється електронним способом, а в горизонтальній - механічним поворотом всієї антени.
Багатоканальний приймач супегетеродинного типу з підсилювачем високої частоти і кількоразовим перетворенням по проміжній частоті.
Сигнали послідовно проходять три етапи селекції: просторову, часову і частотну.
Просторова селекція здійснюється антеною. В залежності від режиму роботи формується 1, 2 або 3 просторових канали.
Часова селекція здійснюється в кожному просторовому каналі селекторами дальності. Кількість паралельних каналів дальності залежить від режиму роботи (огляд чи супроводження), наявності чи відсутності каналу компенсації сигналів по бічним пелюсткам ДСА, скважності зондуючих сигналів.

Слайд 32Частотна селекція здійснюється в кожному каналі дальності шляхом виділення одної
спектральної складової вузькосмуговими доплерівськими фільтрами, які реалізуються цифровими або алгоритмічними
методами.
Часовий графік роботи РЛПК складається з послідовності тактів. Впродовж такту параметри і режими роботи всіх каналів і РЛС в цілому незмінні. За час такту вирішується часткова задача, результати рішення видаються в ЕОМ.
ЕОМ або ЦОС є невід'ємна складова РЛПК. Цифрова мультиплексна двохнаправлена магістраль зв'язує головні канали та блоки з ЕОМ (ЦОС). Вона включає цифрові паралельні шини адресу і даних та аналогову шину управління. Блоки та канали мають пристрої зв'язку з магістраллю.
ЕОМ (ЦОС) здійснює управління всіма елементами РЛПК, контроль їх стану, обробку сигналів та інформації, зберігання інформації, рішення бойових задач, обмін інформацією із спряженими системами, взаємодію з ОЕПС, контроль стану РЛПК, підготовку до застосування та управління зброєю, формує команди управління літаком і спряженими системами.
Обмін інформацією між РЛПК і ОЕПС здійснюється через спільну ЦОС.
Обмін інформацією між РЛПК і спряженими з ним системами здійснюється послідовним стандартним кодом через цифрові лінії та аналоговими сигналами через пристрій вводу-виводу.

Слайд 33*
Режими роботи РЛПК
1. Огляд повітряного простору (багатоцільовий режим – БЦР).
При
веденні дальнього ракетного бою (ДРБ) здійснюється пошук повітряних цілей, їх
виявлення, визначення координат і параметрів руху, розпізнавання, ідентифікація з цілевказанням в секторі, положення і розміри якого залежать від способу наведення (автоматизоване або ручне) і точності цілевказання.
2. Огляд підстилаючої поверхні.
Здійснюється для отримання радіолокаційної карти місцевості з пошуком і визначенням координат орієнтирів та цілей для забезпечення літаковождіння, розвідки і враження цілей.
3. Вертикаль.
При веденні ближнього маневреного бою (БМБ) здійснюється прискорений пошук і виявлення цілі, що спостерігається візуально, для швидкого переходу до її супроводження по координатам.
4. Супроводження цілі (одноцільовий режим – ОЦР).
Супроводження атакуємої повітряної цілі по дальності, швидкості і кутовим координатам забезпечує їх вимірювання з точністю, достатньою для прицілювання і цілевказання ГСН і спряженим системам.
Слайд 34*
5. Підсвітлювання цілі.
Застосовується для забезпечення роботи РГС ракет напівактивного типу.
6.
Радіокорекція.
Застосовується при веденні дальнього ракетного бою для корекції даних про
параметри польоту цілі в пам'яті системи управління ракетою з РГС після її пуску з метою забезпечення виведення ракети у таке положення відносно цілі, при якому її РГС зможе виявити ціль у випадку застосування ціллю протиракетного маневру.
7. Маловисотний політ (МВП).
Забезпечує визначення прогнозованої висоти прольоту над підстилаючою поверхнею на упередженій дальності для недопущення зіткнення з нею маневруванням у вертикальній чи горизонтальній площині при автоматичному чи напівавтоматичному пілотуванні.
8. Доплерівське загострення ДСА.
Застосовується для підвищення кутової розділюючої спроможності шляхом вузькосмугової доплерівської селекції сигналів цілі.
9. Синтезування апертури.
Спеціальною когерентною обробкою сигналів в ЕОМ синтезується штучна апертура антени великих розмірів для отримання радіолокаційного зображення, якість якого близька до якості оптичного зображення.
Слайд 35*
Взаємодія РЛС зі складовими РЛПК і СУЗ
Взаємодія з ЕОМ:
синхронізація,
узгодження машинного і апаратурних тактів;
внутрішній обмін інформацією по паралельним магістралям;
зовнішній
обмін по послідовним цифровим і аналоговим лініям;
комбінований метод рішення задач апаратурними аналоговими пристроями, цифровими пристроями і програмним способом.
Взаємодія з СЄІ:
обмін інформацією і командами через ЕОМ;
синхронізація.
Взаємодія з ЛРЗ:
синхронізація;
загальна антена;
управління через ЕОМ.
Взаємодія з іншими локаційними системами:
цілевказання;
узгодження режимів роботи;
дотримання встановленої ієрархії (ведучий – ведомий).
Слайд 36*
Взаємодія зі зброєю і системою управління зброєю:
цілевказання;
управління вибором, підготовкою і
застосуванням зброї;
підсвітлювання цілі;
формування і узгодження в часі кадрів радіокорекції.
Взаємодія
з системами наведення:
прийом і відпрацювання разових команд, команд наведення та команд цілевказання.
Взаємодія з ПНС:
отримання інформації про поточні координати, параметри руху і положення винищувача;
корекція ПНС;
забезпечення МВП.
Взаємодія з ТКЗ:
обмін інформацією при групових діях.
Взаємодія з БКО:
обмін інформацією про перешкодову обстановку.
Взаємодія з САУ:
- видача інформації для автоматичного і директорного пілотування.
Слайд 37*
3. РЛС авіаційних розвідувальних комплексів
Розвідувальні авіаційні комплекси (РАК)
Пункт обробки інформацїі
(ПОІ) включає засоби прийому та обробки розвідувальної інформації, що надходить
від пілотуємих і безпілотних розвідувальних літаків та з інших джерел. ПОІ також забезпечує командира необхідною попередньою і оперативною інформацією для планування і виконання розвідувальних завдань та оцінки їх результатів.
Командний пункт (КП) здійснює планування розвідувальних дій, постановку завдань, управління виділеними силами та аналіз результатів виконання завдань.
Розвідувальна авіаційна група (РАГ) з окремих літаків або груп розвідувальних літаків - активна складова комплексу, здійснює повітряну розвідку шляхом візуального спостереження, аерофоторозвідки і розвідки радіоелектронними засобами.
Розвідувальні авіаційні комплекси призначені для ведення повітряної розвідки наземних та морських об'єктів противника в оперативній та тактичній глибинах, місцевості та погоди для забезпечення дій усіх видів Збройних Сил.
Слайд 38*
РРЛС – розвідувальна РЛС
ДВШЗ – доплерівський вимірювач швидкості
і кута зносу
РНС – радіотехнічна навігаційна система
ІНС – інерційна навігаційна
система
ОІ – оперативний індикатор
ЗЗІ – засоби зберігання інформації
РЛ – радіолінія
Радіоелектронна розвідка поділяються на :
- радіорозвідку - використовуються літакові радіоприймальні пристрої, розкривається зміст радіопередач, склад і дислокація сил противника, його діяльність і наміри;
- радіотехнічну розвідку прийомо-пеленгаційними пристроями, визначаються технічні параметри засобів радіолокації й радіотелеуправління, їх місцезнаходження;
- радіолокаційну розвідку - виконується літаковими РЛС, виявляються об'єкти, контрастні в радіолокаційному відношенні, розкриваться заходи противника по радіолокаційному маскуванню;
- телевізійну, теплову, лазерну, радіаційну та інші види розвідки.
Радіолокаційне обладнання РАК забезпечує отримання високоякісного радіолокаційного зображення підстилаючої поверхні з об'єктами і цілями на ній.
Слайд 39*
РЛС розвідувальних комплексів
Радіолокаційну карту (панораму) місцевості можна отримати обертанням або
скануванням в межах сектора ДСА навколо вертикальної осі (звичайна панорамна
РЛС кругового або секторного огляду з орієнтацією ДСА вперед - РЛС ПО) або переміщенням нерухомої антени, ДСА якої спрямована вбік, разом з літаком (в РЛС бокового огляду - РЛС БО).
Кутова розділююча спроможність δφ в звичайних РЛС (без синтезування апертури антени) визначається шириною ДСА φАнт і не залежить від дальності D, а лінійна δl=δφ⋅D погіршується пропорційно дальності. У апертурних антен ширина ДСА φАнт =λ/dАнт обернено пропорційна розкриву апертури dАнт, яка обмежується конструкцією літака.
В РЛС БО з великою нерухомою продовжфюзеляжною антеною панорама отримується завдяки переміщенню літака з антеною. Така РЛС завдяки великому розміру апертури антени має значно кращу кутову (і лінійну) розділюючу спроможність, ніж РЛС ПО.
Слайд 40*
Обом типам РЛС притаманні характерні викривлення зображення, які виникають через
протилежну залежність від дальності лінійної розділюючої спроможності в поперечному напрямку
δl=δφ⋅D і лінійної розділюючої спроможності по горизонтальній дальності δDГ=δD/cosφ.
На середніх дальностях δl≈ δDГ і зображення точкової цілі має форму крапки. На великих дальностях δl>>δDГ і точкова ціль відображається у вигляді відмітки, розтягнутої у поперечному напрямку, а на малих дальностях δl<< δDГ і точкова ціль відображається у вигляді відмітки, розтягнутої впродовж осі дальності. На великих дальностях зображення розмазане у поперечному напрямку, а на малих – впродовж осі дальності.
Від таких викривлень зображення вільні когерентні РЛС з синтезуванням штучної апертури (РЛС СА).
Слайд 41*
РЛС з синтезованою апертурою
Механізм синтезування апертури має схожість з механізмом
формування ДСА у ФАР: просторова характеристика (ДСА) ФАР створюється шляхом
одночасного когерентного (синфазного) складання сигналів усіх її елементів. Елементом еквівалентної ФАР при синтезуванні апертури являється реальна антена, яка в процесі переміщення носія РЛС послідовно заміщує елементи еквівалентної ФАР. Всі прийняті сигнали запам'ятовуються і когерентно накопичуються.
Можливий інтервал синтезування LС (зелена смуга) по координаті Х обмежується шириною φАнт реальної ДСА і пропорційний дальності D відповідної ділянки поверхні, тобто розмір синтезованої апертури dС=LС=D⋅ φАнт. Ширина синтезованої ДСА на цій дальності φС= λ/dС, а лінійна розділююча спроможність на будь-якій дальності впродовж осі Х становить δх=φС⋅D=λ/φАнт і не залежить від дальності.
Слайд 42*
З урахуванням того, що поняття ДСА характеризує просторові характеристики антени
при її роботі тільки на прийом або тільки на передачу,
а синтезується ДСА в активній РЛС, тобто її просторові властивості впливають на зондуючий і відбитий сигнали (двічі), лінійна розділююча спроможність у поперечному напрямку
δх= dАнт /2,
тобто теоретично не залежіть від дальності і дорівнює половині розміру апертури реальної антени продовж осі Х.
Ширина синтезованої ДСА φСА=λ / dС= λ / D⋅ φАнт обернено пропорційна дальності (у реальної антени – не залежить від дальності).
Слайд 43*
Закономірності відбитих сигналів в РЛС СА
На інтервалі синтезування LC поточна
дальність D об'єкту, розташованому на відстані D0 від лінії польоту
літака з РЛС СА, змінюється приблизно по квадратичному закону у функції від координати х. Тому затримка відбитих сигналів і їх поточна фаза теж змінюються по квадратичному закону, а частота (похідна від фази) – по лінійному. Параметри цих законів залежать від дальності D0 і швидкості W носія РЛС СА.
При зондуванні з постійною частотою f0 від цілі повертаються відбиті ЛЧМ сигнали, база В яких більше одиниці. При оптимальній обробці відбиті сигнали стиснуться у часі (у функції від координати х) в В разів і відповідно стиснеться по координаті х відмітка цілі.
Швидкість зміни частоти і фази відбитих сигналів зменшуються при зростанні дальності цілі D0 і одночасно зростає можливий інтервал синтезування LC. Тому для кожної дальності потрібен свій канал обробки.
Тривалість пачок відбитих сигналів пропорційна дальності цілі і дорівнює інтервалу часу, впродовж якого літак долає відстань LC.
Слайд 44*
Обробка сигналів в РЛС СА
Складність реалізації РЛС СА пов'язана не
тільки з необхідністю використання зондуючих сигналів з великим інтервалом когерентності
TКог≥LC/W, але ще і з необхідністю одночасної обробки майже повністю співпадаючих у часі пачок сигналів від усіх елементів дальності тривалістю ТС=ТОпромін=LC/W=D⋅φАнт/W з урахуванням особливостей їх фазової структури, яку руйнують випадкові відхилення траси польоту від теоретичної. Ці відхилення треба точно вимірювати і компенсувати в алгоритмах обробки сигналів.
Поки що у більшості РЛС СА, що заходяться на озброєнні, реалізована оптична обробка у два етапи – багатоканальний по дальності запис сигналів з виходу фазового детектора когерентної РЛС у реальному масштабі часу і наступна обробка відснятих фотоплівок спеціальними пристроями в ПОІ.
У більш досконалих РЛС сигнали не запам'ятовуються на плівці, а передаються по радіоканалам на землю для оперативної обробки.
В сучасних РЛС СА вся обробка здійснюється на борту у реальному масштабі часу потужними ЦОС, а отримана розвідінформація передається по радіоканалу або використовується на борту.

Слайд 45*
Особливості синтезування при імпульсному випромінюванні
Синтезована ДСА при безперервному випромінюванні відповідає
ДСА реальної антени з суцільною апертурою, а при імпульсному –
з дискретною апертурою, наприклад, як у ФАР. В залежності від співвідношення між довжиною хвилі λ і відстанню Δl між сусідніми елементами “ФАР” її ДСА матиме один або декілька головних пелюстків.
Однопелюсткова ДСА при синтезуванні апертури буде при умові, що зміщення літака з РЛС за період повторення зондуючих сигналів буде не більшим величини розкриву dАнт реальної антени. При цьому із всіх напрямків, в яких відбиті сигнали при послідовних зондуваннях мають різницю фаз, кратну 2π, реальною ДСА буде відселектовано тільки один. Для цього розмір апертури реальної антени повинен задовольняти умові
dАнт >2W⋅TП.
Якщо реальну антену в РЛС СА відхилити вперед або назад, то можна відселектувати пелюсток синтезованої ДСА, орієнтований вперед або назад. При цьому, як і у ФАР, головний пелюсток синтезованої ДСА розшириться.
φ
Слайд 46*
Фокусована і нефокусована обробка
Щоб сигнали від послідовності зондувань складались у
фазі, треба спочатку компенсувати фазові зсуви між сусідніми відбитими сигналами.
Додатковий зсув фази відбитих сигналів від точкового об'єкту на дальності D0, який треба компенсувати, залежить від поточного значення координати х:
φ[x(t)]=2π(W⋅t - x0)2/λ⋅D0.
Синтезовану ДСА треба зфокусувати на дальність D0, а компенсація зсувів фази повинна бути багатоканальною по дальності. При фокусуванні ДСА і виборі інтервалу синтезування LC= φАнт⋅ D0 теоретично забезпечується постійна величина лінійної розділюючої спроможності δх= dАнт /2 по осі Х.
В РЛС з нефокусованою апертурою забезпечують майже синфазне накопичення відбитих сигналів обмеженням інтервалу синтезування так, щоб максимальна різниця фаз не перевищувала π/4:
При цьому не забезпечується потенційна лінійна розділююча спроможність δх= dАнт /2 по координаті Х .
Слайд 47*
Огляд поверхні в РЛС СА
Передньо-боковий огляд реалізується шляхом переміщення антени
з нерухомими реальною і синтезованою ДСА разом з літаком паралельно
самим собі. При цьому радіолокаційне зображення (РЛЗ) формується по рядкам, його центральна точка (ЦТ) переміщується паралельно проекції лінії шляху літака.
Телескопічний огляд формується у вигляді окремого кадру навколо нерухомої ЦТ. Розмір кадру визначається шириною реальної ДСА і відстанню до ЦТ, яка змінюється внаслідок руху літака. Багаторазовий огляд кадру обраної ЦТ забезпечується шляхом орієнтації осі реальної ДСА на ЦТ з середини кожного інтервалу синтезування чергового кадру.
Секторний огляд здійснюється шляхом сканування ЦТ у заданому секторі. ДСА реальної антени при цьому сканує у секторі і одночасно переміщується разом з РЛС СА.
Слайд 484. Робота РЛС у складі ПНС і СУО
Панорамна РЛС (ПРЛС)
забезпечує отримання радіолокаційної карти місцевості з розташованими на ній нерухомими
та рухомими об'єктами. Це забезпечує виявлення та розпізнавання наземних і надводних цілей , визначення їх координат та інших характеристик.
Літаковий радіолокаційний запитувач (ЛРЗ) системи державного розпізнавання забезпечує класифікацію цілей на “свої” і “чужі”.
Ця інформація використовується для рішення навігаційних та бойових задач.
Робота ПРЛС у складі ПНС
ПРЛС огляд підстилаючої поверхні здійснює шляхом сканування пелюсткової ДСА у секторі, положення і розмір сектора якого визначаються відповідно до конкретної бойової задачі. Зондування здійснюється некогерентними або когерентними періодичними послідовностями на низьких частотах повторення, які забезпечують однозначне вимірювання дальності імпульсним методом. Пеленгація здійснюється шляхом аналізу обвідної пачки відбитих сигналів. При зміні масштабу дальності тривалість зондуючих сигналів змінюється так, щоб не змінювалась скважність і середня потужність.
 забезпечує")
Слайд 49*
При огляді РЛ карта відображається системою індикації (СІ) в режимі
ПМ у полярних координатах “азимут-дальність”. Точкові об'єкти розпізнаються по їх
положенню відносно характерних орієнтирів, а неточкові – по їх конфігурації. Координати об'єктів визначаються грубо по масштабній сітці, а точно – по координатам рухомої марки (перехрестя лінії пеленгу з кільцем дальності) при її накладанні на об'єкт.
Для більш точного визначення координат об'єкту при прицілюванні РЛ карта ділянки місцевості з об'єктом в режимі МПМ відображається у крупному масштабі в декартових координатах “азимут-дальність”.
Державна приналежність нерухомих об'єктів визначається по їх положенню відносно орієнтирів, а рухомих – запитувачем ЛРЗ системи державного розпізнавання.
Супроводження цілі по координатам здійснюється ручною синхронізацію руху прицільного перехрестя (лінія прицілювання – кільце дальності) відносно цілі, а в ПРЛС літаків 5-го покоління – програмно кореляційно-екстремальним методом.
Селекція рухомих цілей доплерівськими методами очищає РЛ карту від непотрібних відміток нерухомих об'єктів.
Режим маяк застосовується для визначення положення носія ПРЛС відносно нерадіоконтрастних об'єктів методом радіолокації з активною відповіддю: ПРЛС – запитувач, а радіомаяк – відповідач.
 в режимі ПМ")
Слайд 50Синхронізатор ПРЛС з упередженням відносно ІЗП для власного передавача видає
в літаковий радіолокаційний запитувач (ЛРЗ) імпульси запуску шифратора сигналів запиту.
Шифратор формує код запиту, яким запускається передавач запитувача. Кодовані сигнали запиту частоти fЗ випромінюються об'єднаною антеною РЛС і запитувача в тому ж напрямку, що і зондуючий сигнал. Здійснюється розпізнавання саме того об'єкту, який спостерігається ПРЛС.
У відповідачі об'єкту дешифратор приймача в разі правильного кодування сигналу запиту запускає шифратор коду відповіді, яким модулюється сигнал відповіді частоти fВ.
В приймачі запитувача з сигналу відповіді виділяються код відповіді. У разі співпадіння прийнятого коду відповіді з діючим дешифратор приймача формує ознаку свого об'єкту. Для збільшення достовірності розпізнавання інформація про державну приналежність об'єкту накопичується впродовж кількох циклів “запит – відповідь” – видається імпульс гарантованого розпізнавання свого об'єкту.
На шифрацію і дешифрацію кодів запиту і відповіді витрачається певний час. Для того, щоб момент формування відмітки розпізнавання співпадав з моментом приходу відбитого сигналу, і здійснюється упереджуючий запуск шифратора коду запиту. Застосування об'єднаної антени ПРЛС і ЛРЗ забезпечує відображення відміток об'єкту і цілі з однаковим азимутом.
Робота запитувача РЛ системи розпізнавання

Слайд 51Робота ІДРЛС у складі СУО
Трьохкоординатна РЛС радіолокаційного прицільного комплексу (РЛПК)
забезпечує контроль повітряного простору з виявленням та розпізнаванням повітряних цілей,
визначенням їх координат та інших характеристик.
Літаковий радіолокаційний запитувач (ЛРЗ) системи державного розпізнавання забезпечує класифікацію виявлених цілей на “свої” і “чужі”.
Ця інформація використовується для рішення навігаційних та бойових задач.
У складі СУО РЛПК застосовується автономно або у взаємодії з оптико-електронною прицільною системою (ОЕПС).
При автономному застосуванні потрібний режим і параметри роботи РЛПК - огляд та пошук повітряних цілей при веденні дальнього ракетного (ДРБ) чи ближнього маневренного бою (БМБ), супроводження обраної для атаки цілі, огляд землі – обирається вручну або автоматично в залежності від умов перехоплення – напівсфери (ПНС або ЗНС) та висоти цілі, що перехоплюється, і команд наведення.
Загальні відомості
Слайд 52
При взаємодії з ОЕПС в залежності від умов перехоплення і
типу обраної зброї РЛПК призначається ведучим або ведомим. При цьому
ведучий канал координує дії ведомого, а ведомий інформаційно підтримує ведучий.
Режим випромінювання ІД РЛС – з високими (ВЧП), середніми (СЧП) або низькими (НЧП) частотами повторення вибирається вручну або автоматично відповідно до характеру і умов виконання бойового завдання. При застосуванні ракет з напівактивними радіолокаційними голівками самонаведення (РГС) перехід від імпульсного випромінювання до безперервного здійснюється автоматично.
Слайд 53Огляд і пошук цілей
Огляд повітряного простору здійснюється у секторі, кутові
розміри якого φГС=±ΔГ/D і φВ=±ΔВ/D визначаються лінійними помилками цілевказання ΔГ,
ΔВ по горизонталі та вертикалі і дальністю цілі D. Це гарантує попадання цілі в сектор пошуку при його орієнтації згідно ручному чи автоматичному цілевказанню. Кутові розміри сектору повинні зростати при зменшенні дальності цілі.
Сектор стабілізовано у просторі.
Пошук цілей у секторі здійснюється горизонтальними рядками. Кількість рядків у секторі визначається його розміром φВ і шириною головного пелюстка ДСА φАнт.
Робота РЛС організована по тактам. В кожному напрямку прозорість у потрібному діапазоні дальностей, а при СЧП – і швидкостей, забезпечується перебором кількох частот повторення. В разі виявлення цілі перебір частот призупиняється і в часову діаграму вклинюються два вимірювальних такти. По цілевказанню від РЛПК запитувач ЛРЗ визначає державну приналежність кожної виявленої цілі.
Інформація про кожну виявлену ціль по цифровій магістралі вноситься у відповідну чарунку пам'яті ЕОМ.
Інформація про всі виявлені цілі видається в пам’ять системи єдиної індикації (СЄІ) для відображення повітряної обстановки на індикаторі лобового скла (ІЛС) в декартових координатах «азимут-дальність». Вибір цілі для атаки здійснюється по автоматично або вручну.
Робота ІДРЛС при ДРБ

Слайд 54
Супроводження цілі
По команді ЗАХВАТ припиняється огляд сектору і по цілевказанню
з відповідної чарунки пам'яті ЕОМ або СЄІ ДСА спрямовується у
вказаному напрямку. Інтервал часу між моментами запису інформації про ціль і її зчитування для цілевказання може досягати кількох секунд. Тому у вказаному напрямку цілі найймовірніше не буде, але вона буде поблизу нього.
Додатковий пошук цілі здійснюється у вузькому секторі поблизу напрямку цілевказання горизонтальними рядками. Швидкість пошуку зменшена для отримання більш достовірної інформації. При виявленні цілі уточнюються її координати, повторно визначається її державна приналежність і РЛС переходить в одноцільовий режим.
Супроводження цілі по координатам ведеться роздільно по кутовим координатам, дальності і швидкості. Слідкуюча система включає аналоговий дискримінатор помилки супроводження, програму обробки помилки супроводження α-β - фільтром або фільтром Калмана і аналоговий канал підстройки дискримінаторів.
Утримання цілі в зоні прозорості по дальності і швидкості здійснюється відповідною зміною частоти повторення.
Поточні координати цілі обробляються бойовими алгоритмами ЕОМ для прицілювання в упереджену точку зустрічі ракети з ціллю, цілевказання голівкам самонаведення і спряженим системам – ОЕПС, СЄІ, ЛРЗ, САУ та СУЗ. Помилка прицілювання в координатах δГ, δВ видається в САУ і відображається ІЛС відповідним зміщенням прицільної марки (кільця) відносно нерухомого перехрестя.

Слайд 55
Підсвітлювання цілі здійснюється при застосуванні ракет з РГС шляхом вклинювання
тактів підсвітлювання і радіокорекції між тактами супроводження по дальності і
по швидкості. Впродовж цих тактів передавач РЛС переходить до безперервного випромінювання на спеціальні літерній частоті підсвітлювання, відмінній від будь-якої робочої частоти РЛС. При цьому продовжується супроводження цілі по координатам в режимі екстраполяції.
Підсвітлювання припиняється по закінченню прогнозованого часу польоту ракети до цілі.
Радіокорекція призначена для уточнення інформації про ціль при зміні параметрів її руху після пуску ракет. Для цього в тактах підсвітлювання сигнал літерної частоти підсвітлювання маніпулюється по частоті двохрозрядним трійковим кодом поточних поправок координат та їх похідних (відносно розрахованих в РГС). Впродовж одного такту радіокорекції передається одна з поправок. Ще один такт радіокорекції використовується для передачі разових команд.
Вихід з атаки забезпечується переміщенням прицільної марки вгору і праворуч або ліворуч. Це вимушує пілота відвернути від бойового курсу вгору і праворуч чи ліворуч з максимальним перевантаженням. Цим виключається небезпека попадання в зону враження власних ракет та зіткнення з ціллю або з її уламками.
При виході з атаки зривається супроводження атакуємої цілі і РЛС повертається до огляду повітряного простору і пошуку цілей.

Слайд 56Ближній маневренний бій (БМБ) ведеться швидкотічно при візуальному контакті з
ціллю. Тому замість огляду повітряного простору і пошуку цілі здійснюється
пряме візуальне цілевказання слідкуючим системам РЛС.
РЛС працює в режимі Вертикаль, при якому ДСА сканує двома вертикальними відносно площин крил рядками, а в полі зору ІЛС формуються границі зони пошуку цілі (зелений пунктир).
Природно, що при взаємному положенні винищцвача і цілі (а) пілот почне координований розворот праворуч з правим креном (б). Крен має бути таким, щоб ціль, що спостерігається візуально, опинилась в зоні пошуку. При виявленні цілі РЛС автоматично переходить до звичайного її супроводження по координатам.
*
Робота ІДРЛС при БМБ
Слайд 57*
Робота запитувача ЛРЗ винищувача аналогічна роботі ЛРЗ ударного літака (слайд
№ 50).
Особливість у тому, що для забезпечити однозначної по
дальності ідентифікації відміток розпізнавання при веденні ДРБ імпульси запуску передавача запитувача проріджуються відносно ІЗП РЛС. Надалі відмітки розпізнавання синтезуються для кожного відбитого сигналу.
Робота запитувача РЛ системи розпізнавання
Слайд 58*
Питання для самоконтролю
1. Характеристика основних типів авіаційних комплексів.
2. Застосування
РЛС у складі основних типів авіаційних комплексів.
3. Призначення, задачі і
ТТХ РЛС із складу ПНС і СУЗ.
4. Переваги і недоліки РЛС із складу ПНС і СУЗ у порівнянні з іншими технічними засобами отримання інформації ПНС та СУЗ.
5. Принципи побудови РЛС із складу ПНС і СУЗ.
6. Режими роботи РЛС із складу ПНС і СУЗ.
Слайд 59*
Завдання на самостійну роботу
Конспект по темі заняття доповнити матеріалом з
навчального посібника і рекомендованих підручників.
Презентація РЛС АК.ppt.
П.И.Дудник. Авиационные радиолокационные устройства.
– М.: ВВИА им. Н.Е.Жуковского, 1976, с.380-395, 410-421, 442-460.
Радиоэлектронное оборудование. Под ред. В.М. Сидорина. – М.: Воениздат, 1990, с. 195-202.
В.А.Войчук, В.І.Романенко, Д.В.Васягін. Експлуатація й ремонт радіоелектронного обладнання літаків, вертольотів та авіаційних ракет. (Електронний підручник). – К.: НАУ, 2011, тема 10.


Інформаційна")





")





 нахил площини візування (бокова наводка)")
2. РЛС авіаційних комплексів перехоплення")






 і оптико-електронна прицільна система (ОЕПС) забезпечують перехоплення")
Склад РЛПКІмпульсно-доплерівська трьохкоординатна РЛС контролю повітряного простору, прицілювання")

.При веденні")



Пункт обробки інформацїі")

 місцевості можна отримати обертанням або скануванням")







 забезпечує")

 ведеться швидкотічно при візуальному контакті з ціллю.")